合肥雙合智能科技有限公司
回轉支撐自動化自動化方案設計

項目要求
1.回轉支承軸承工藝流程
裝配流程:鉗修、清洗、打鋼印編號、軌道涂防銹油、內外圈裝配鋼球、裝隔離塊、堵塞、銷釘并檢驗、安裝油嘴、密封條、注油、安裝標牌、清理表面、刷防銹油、包裝、裝箱、入庫
2,分步實現工藝自動化改造
3,軸承范圍:011.20.200-011.30.560

項目分析

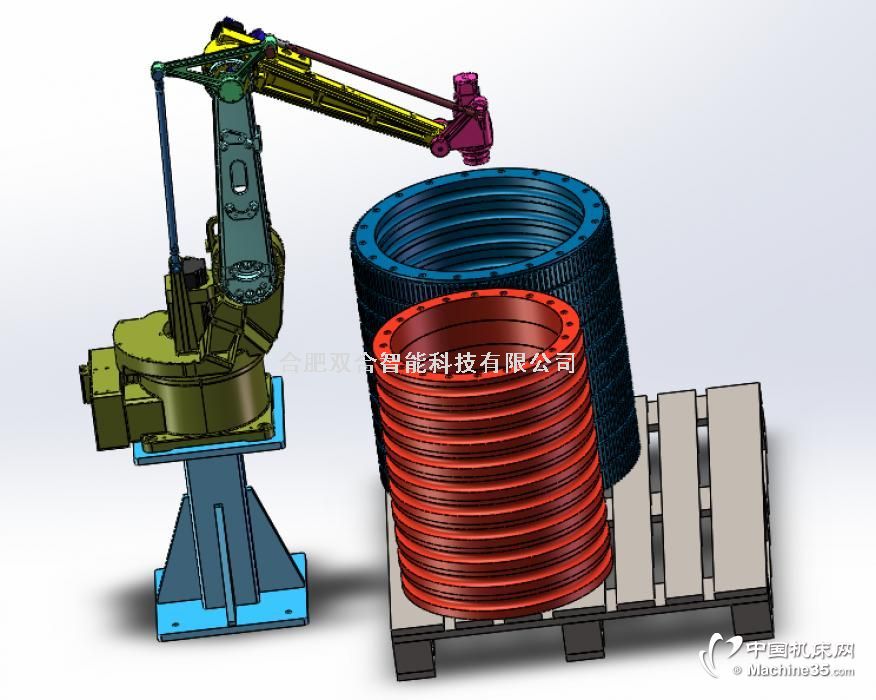
一:上料工作站

四軸搬運機器人,臂展1500左右負載50公斤(根據產品重量確定)
評估:技術成熟。
打磨工作站

1:自制打磨工裝臺
2:六軸打磨機器人
3:打磨機器人負載打磨和搬運功能
(根據現場做具體實施方案)
編號工站


建議使用激光打標機 (也可以使用現有設備) 6KG負載六軸機器人,臂展800定制注油機
裝配工站1:(鋼球-隔離塊)

1:自制裝配工作臺:
2:四軸搬運機器人,負責軸承裝配
工站一及工站二,裝配站1.裝配站二,
機裝配站三之間搬運
3:剛才采用振動盤整列,真空輸送,氣動壓裝
4:該工站為非標設備。根據現場實施具體方案
裝配工站2(堵塞、銷釘并檢驗)

1:裝配工作臺為通用非標設備
2:堵塞,銷釘采用振動盤上料
機器人安裝預壓,氣動壓機
3:檢測采用CCD視覺檢測
4:根據現場實施具體方案
裝配工站3(安裝油嘴、密封條、注油)

1:裝配工作臺為通用非標設備
2:油嘴采用振動盤上料
機器人安裝預壓,氣動壓機
3:檢測采用CCD視覺檢測
4:密封條及注油根據現場確定
裝配工站4(安裝標牌、清理表面、刷防銹油)

根據現場實施具體方案
包裝,封箱,碼垛

1:目前打包采用自動纏繞機
2:開箱,裝箱及封箱為市場常用標記
系統集成。
3:機器人碼垛為技術成熟項目,四軸
碼垛機器人。機器人型號根據現場
選型。
注:聯系我時,請說是在“傲立機床網”上看到的,謝謝!